

























When we imagine a humanoid robot, we almost automatically picture hands with five fingers, joints similar to our own, and movements that mimic those of humans. It’s one of the most deeply ingrained images: robots opening doors, picking up objects, and interacting with the world just as a person would.
Yet, when we step out of science fiction and into automated warehouses, production lines, or logistics departments, reality takes a different path. In industry, the challenge isn’t building a hand that resembles ours, it’s building a system that works better than ours.
New robots must handle objects that are constantly different from one another, often fragile, deformable, irregular, soft, or with unpredictable shapes.
An anthropomorphic hand, however sophisticated, isn’t necessarily the fastest or most efficient solution. In fact, in many cases, it can become more complex to manage.
Consider a logistics warehouse that must simultaneously handle cardboard boxes, bags, food packaging, cosmetics, plastic materials, and irregularly shaped objects: a rigid system designed for a single type of grip would not be effective.
This is where technologies like vacuum come into play, allowing robots to adapt to different objects, reducing mechanical complexity and increasing speed and precision.
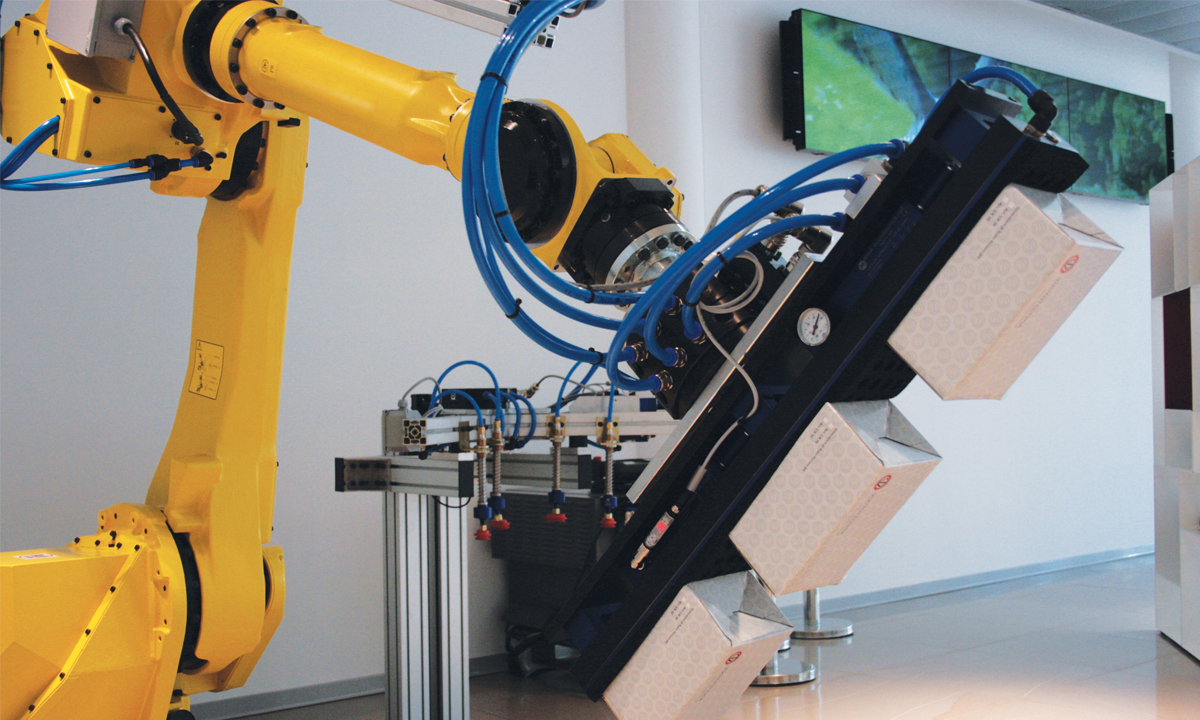
A suction cup does not need to mimic the movement of a human finger: it must establish the correct contact and ensure a reliable grip in the shortest possible time.
It is precisely this philosophy that is reflected in the solutions featured in the Vuototecnica catalogue, with modular solutions designed to be integrated into robots and automated systems, capable of adapting to surfaces and objects that are very different from one another.
Alongside traditional configurations, there are also systems such as the Octopus series, designed to handle products with variable shapes or surfaces that are not perfectly uniform, thanks to a wide and adaptable suction surface.
In contexts such as logistics, packaging, or the handling of difficult materials, this type of approach allows for reduced changeovers, simplified automation, and increased versatility. But vacuum sources and accessories can also make a difference.
In fact, there is no single type of product to handle: there are smooth or porous surfaces, rigid or delicate materials, regular or extremely variable shapes. For this reason, suction cups, supports, compensation devices, and other systems also become elements of an ecosystem designed to adapt to every application.
Manufacturing is no longer what it was a few decades ago, consisting of very long series of identical items, but requires constant format changes, greater customization, and adaptability.
The robots of the future will likely still have two arms and perhaps even a face, but it is by no means certain that they will have hands identical to ours.
The most interesting technology is precisely the one that is least noticeable at first.











